CURRENT RESEARCH
DIGITAL HUMAN MODELLING
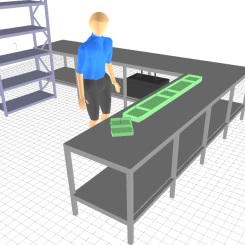
Digital Human Models are representations of humans that enable ergonomics evaluations in virtual environment. An in-house Digital Human Model which includes body, hand and vision modules has been developed. The current research is centred on taking forward the existing development to a highly autonomous and capable 'Digital operator' that can be controlled and utilized with ease and minimal intervention by the user.
Haptic Array Devices
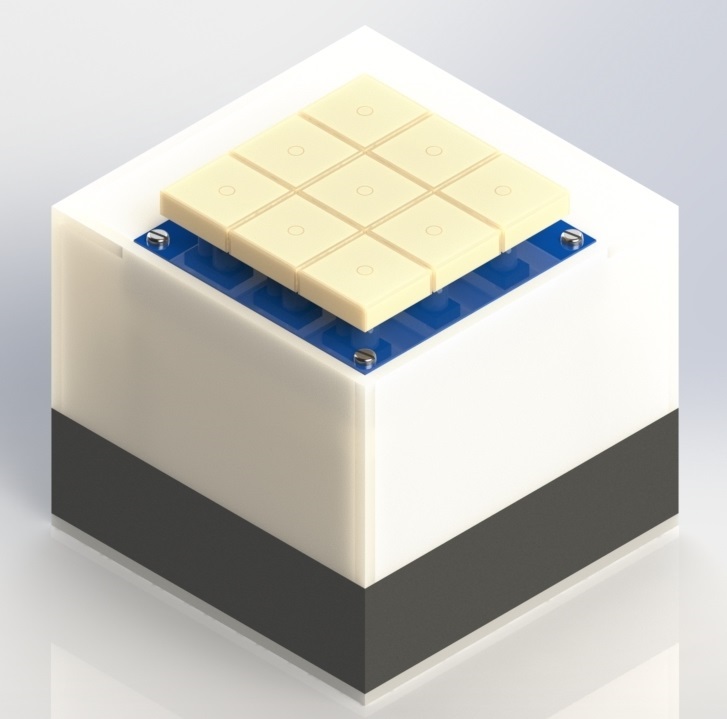
Multi-point Haptic array system (HAS), a haptic device designed for remote palpation application, developed with a vision to help doctors in diagnosing patient at remote location.
This is a low cost device of noval cable driven mechanism with reduced number of actuators compared to other Haptic array devices. The current HAS is a table mount device which can be manufactured
in any scale from finger tip size to full hand size.
Assembly Sequencing

Mechanical assembly planning involves determining
the set of feasible sequences in which the parts are added to assemble a product. Assembly path planning
is to determine the non-colliding and non-blocking directions for each part to travel in 3D-space to assemble
themselves in proper geometric position. Assembly sequences are determined by enumerating the disassembly
sequences, such that the reverse of these sequences will produce a feasible sets of assembly sequences. A part
can be removed from an assembly by combination of single or multi-step translations and rotations. This path
planning of disassembling the parts with multi-step translation is known as multilinear path planning.
Prosthesis

Out of the diverse variety of prostheses available to re-empower a disabled person to a dignified life, prosthetic legs and arms are prominent. Prosthetic legs enable mobility and prosthetic arms enable activities of the amputee. If a person with disability is to be completely rehabilitated, he should perform all tasks a normal person does with equal effectiveness and efficacy. Thus one fundamentally needs to be physically, psychologically, economically and socially rehabilitated.
MECHANISM DESIGN AND ANALYSIS
The application interface will enable users to design and analyse mechanisms in much simpler and intuitive way through various analysis tools. This interface is built on top of the MechKernal library written in the C language. This library uses the concept of modular kinematics to solve the kinematics of a mechanism. Using this application interface, the user will be able to define the geometry of the links by drawing it on screen. Further, the user can define the joints between the links (revolute or prismatic) and also choose the ground link. Then the user can simply run the simulation to see the motion. Further, the user can select a particular link and then select a point from this link to see the path traced by the selected point. This feature can be used to visualize coupler curves in a four-bar mechanism. The user can also analyze the coupler curves by plotting the necessary parameters in order to choose the right mechanism for a particular application.